Klein, aber oho – der „Calli:Bot“
Abschnittsübersicht
-
-
Voraussetzungen
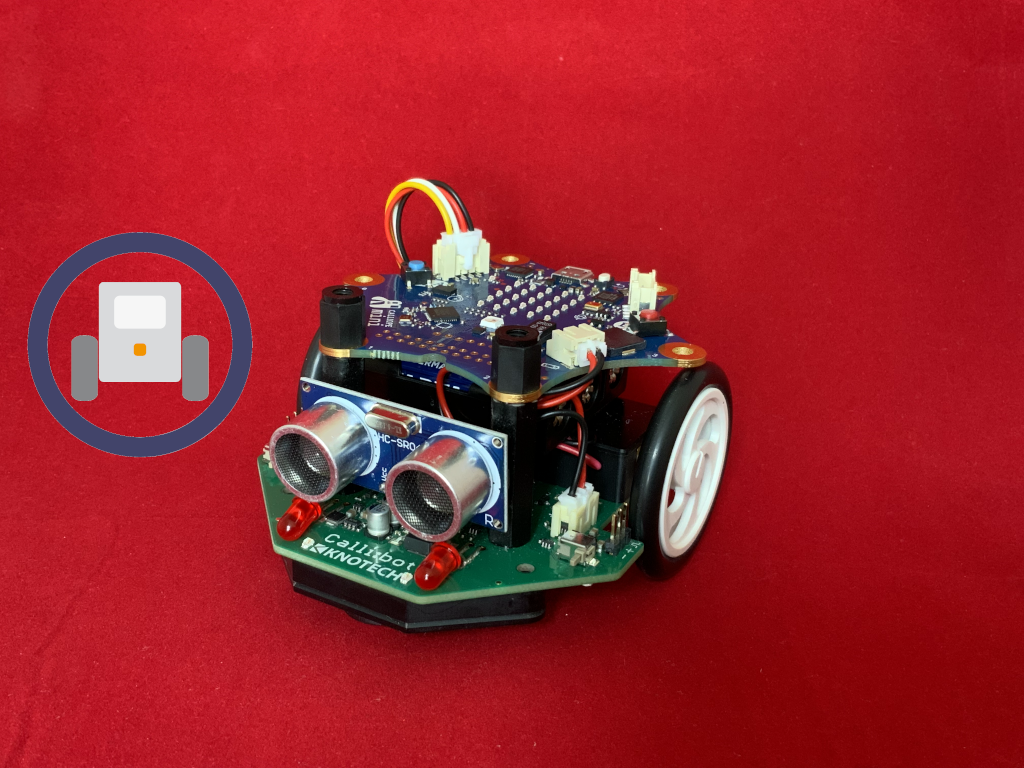
Voraussetzung für diesen Kurs sind Kenntnisse im Umgang mit dem Calliope mini und der Programmierumgebung Microsoft Makecode. Außerdem benötigst du einen Calliope mini. Wenn du bereits einen Calliope-Kurs hier in der Webakademie absolviert hast, bist du hier genau richtig. In diesem Kurs werden wir aus dem Calliope mini ein autonomes Auto bauen und programmieren. Das heißt, unser Calliope mini bekommt ein Fahrgestell, so dass wir einen kleinen Roboter haben, den wir programmieren können. Der Roboter kann sich dann durch dein Zimmer bewegen.
-
-
Zugeschicktes Material
Du solltest von der Webakademie für diesen Kurs den Calli:bot2 in einer Verpackung zugeschickt bekommen haben, wie im folgenden Bild zusehen:

Die Verpackung ist sehr stabil, so dass du deinen Calli:bot bei Nichtgebrauch immer wieder in die Schachtel zurücklegen kannst, dann staubt er auch nicht ein
-
Batterien
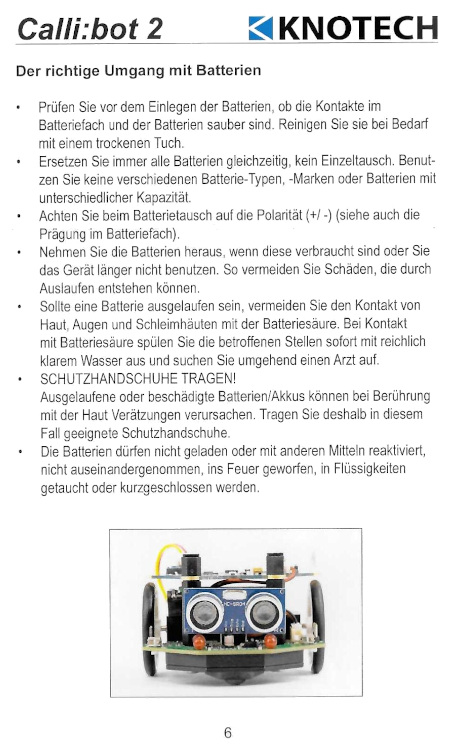
Beim Calliope mini gab es 2 AAA-Batterien dazu. Für den Calli:bot2 benötigst du 3 AAA-Batterien.

In der Bedienungsanleitung gibt es noch ein paar Sicherheitshinweise zu Batterien:
-
Aufbau
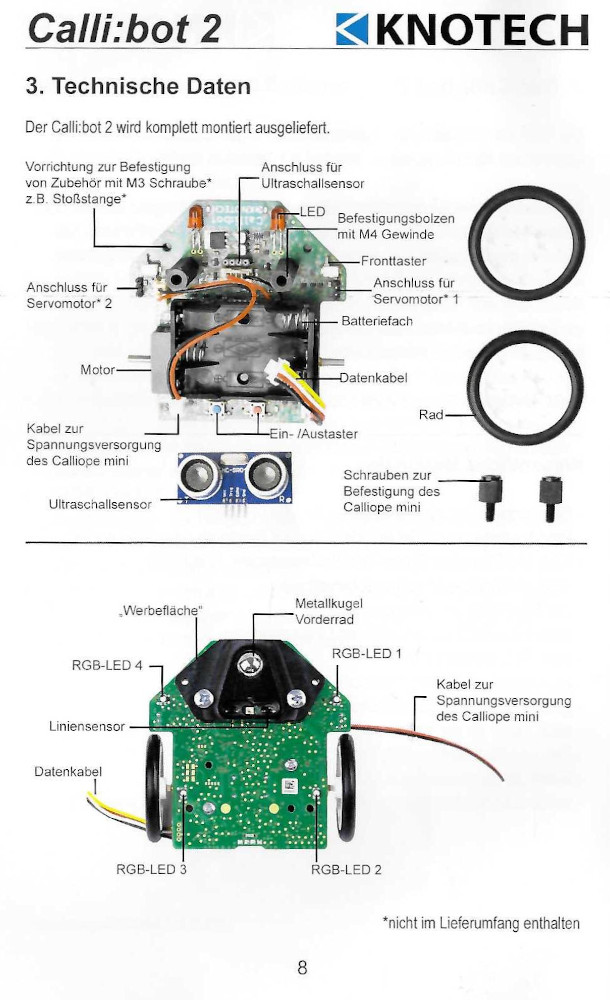
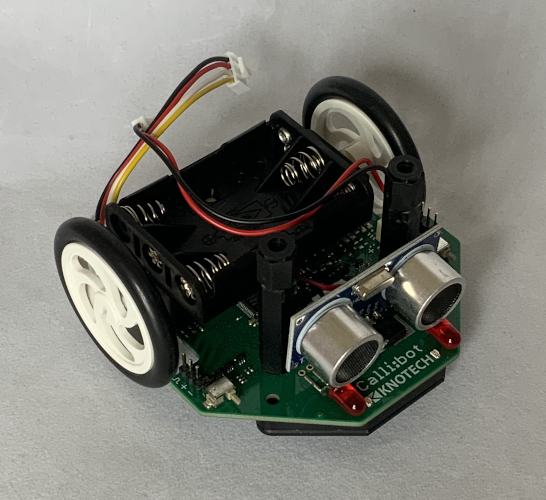
Auf der Seite zu den Technischen Daten kannst du nachlesen woraus das Fahrgestell besteht, bzw. wo die Bauelemente angeordnet sind:
In diesem Abschnitt bauen wir den Calli:bot2 zusammen.
1. Nimm das Fahrgestell aus der Verpackung heraus:
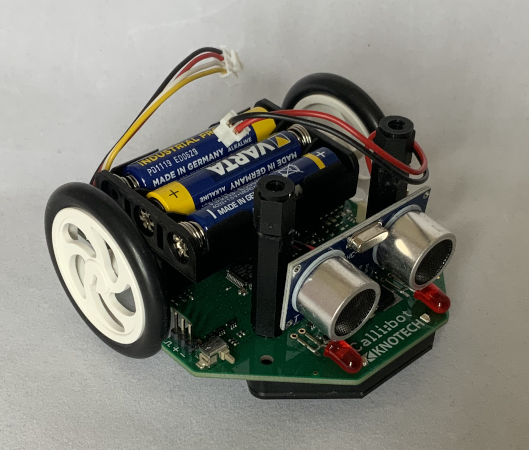
2. Setze 3 AAA-Batterien in das Batteriefach ein.
3. Schraube die Befestigungsbolzen für die Halterung des Calliope mini vom Fahrgestell ab und lege den Calliope mini bereit.
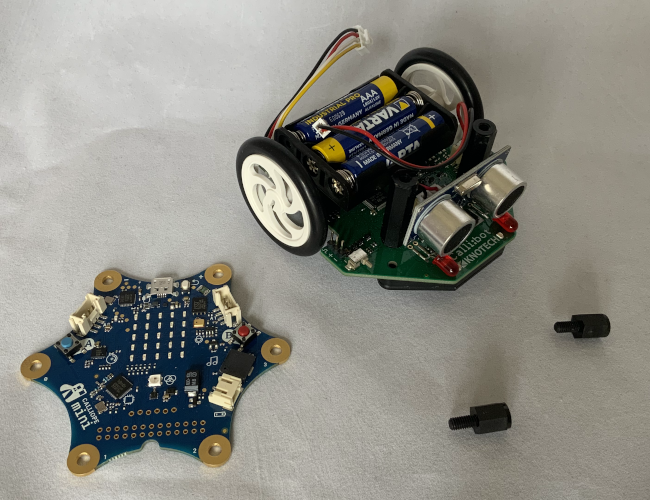
Die folgenden Schritte 4, 5 und 6 kannst du auch in ihrer Reihenfolge tauschen.
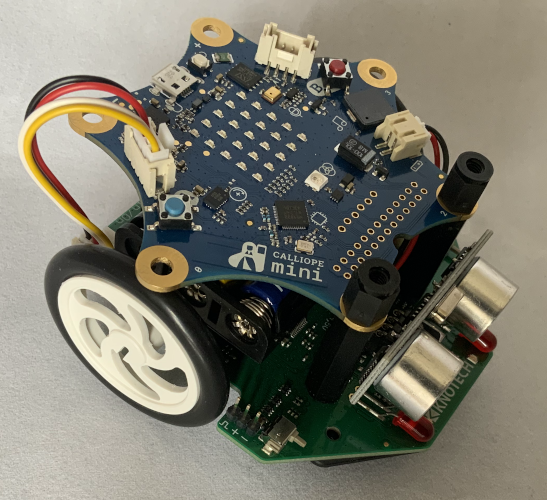
4. Den Calliope mini mit den Befestigungsbolzen über die Pins 1 und 2 befestigen, so dass der USB-Anschluss vom Calliope mini nach hinten zeigt.
5. Schließe das Datenkabel (mit 4 Drähten) am Grove-Anschluss des Calliope mini an neben der Taste A.
6. Schließe das Stromversorgungskabel an der Batteriebuchse des Calliope mini an.
Fertig!
-
Programmieren
Der Calli:bot kann mit MakeCode, NEPO oder TigerJython4Kidsprogrammiert werden. Wir verwenden in diesem Kurs die Programmierumgebung MakeCode. Unter folgender Webadresse kann der Webeditor aufgerufen werden:
https://makecode.calliope.cc/#
-
Konfiguration
Um den Calli:bot2 in Makecode hinzufügen zu können, also damit du ihn programmieren kannst, muss er dem System erst "vorgestellt" werden. Folge dafür der Schritt für Schritt Anleitung.
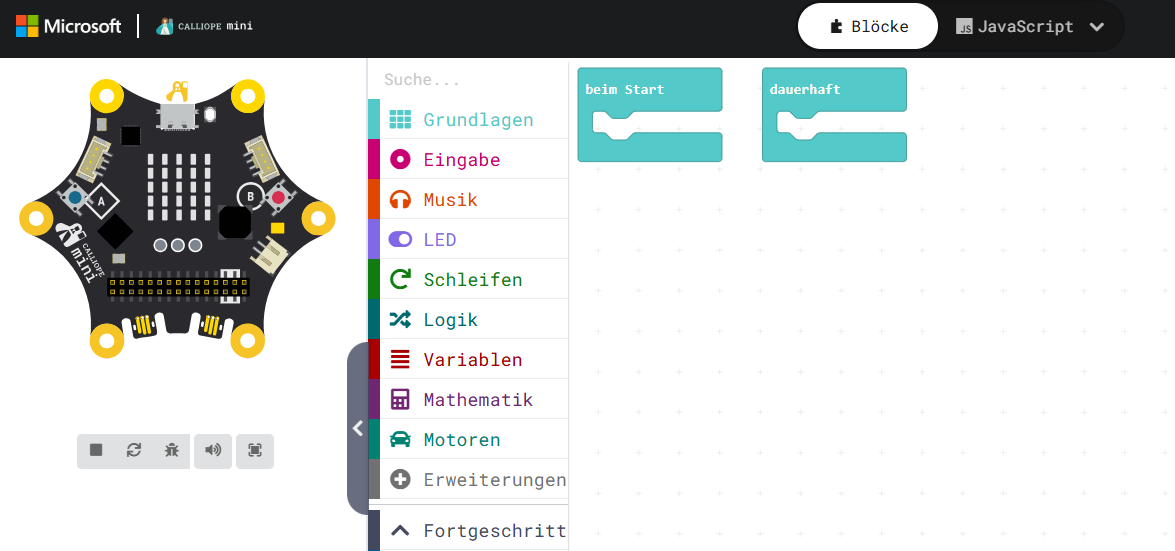
1. Neues Projekt anklicken
2. Name auswählen und Erstelle anklicken
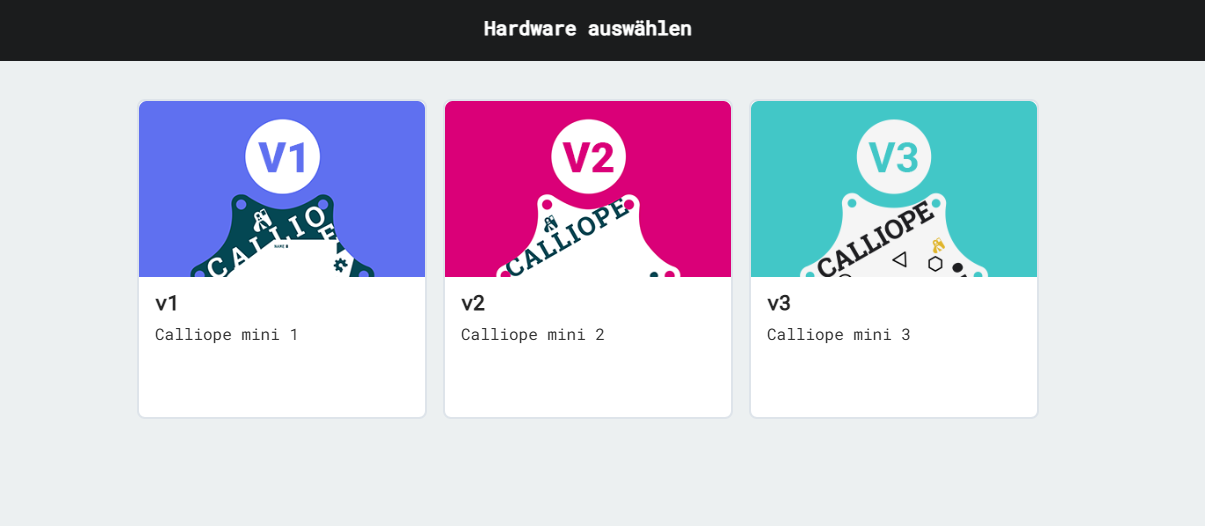
3. Calliope V3 auswählen
4. Erweiterungen anklicken
5. Callibot in die Suchleiste eingeben und dann auswählen
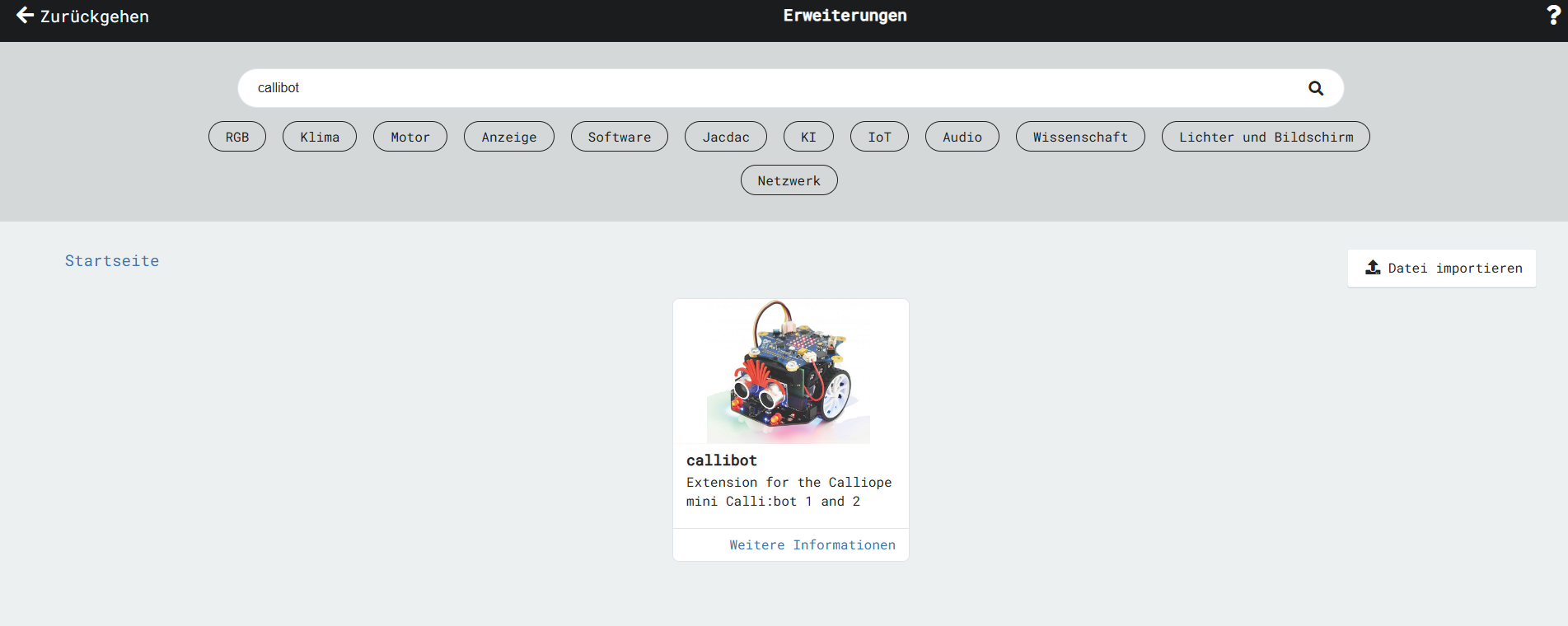
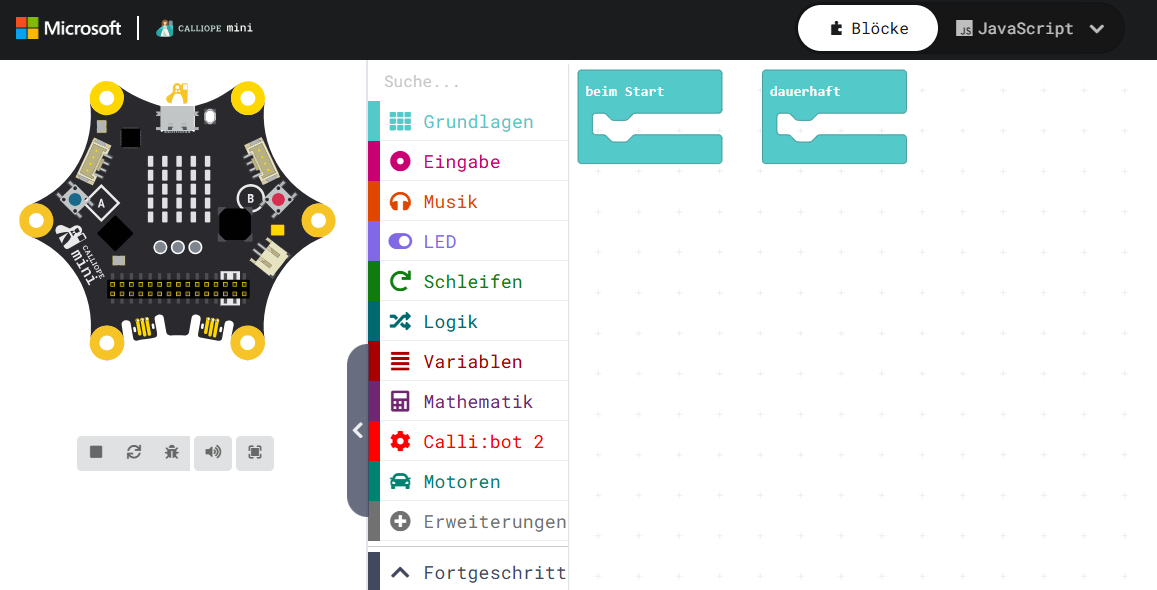
6. Die Funktionen für den Callibot sind jetzt im Makecode verfügbar
-
Erste Programmierschritte
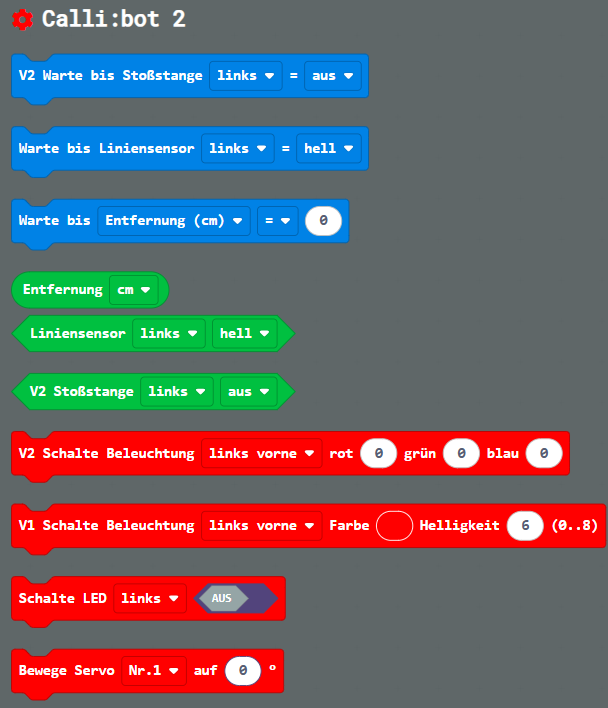
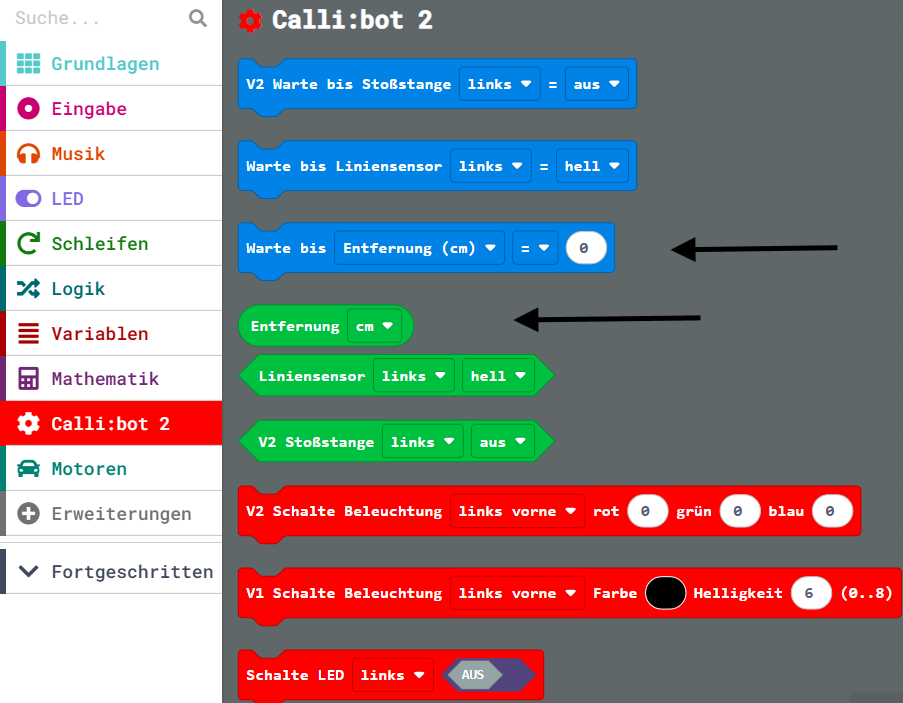
Wähle die Kategorie Calli:bot 2 und dort findest du alle Programmierblöcke des Calli:bots z.B Motoren, Ultraschallsensor (Entfernung), IR Sensor (Liniensensor), LEDs usw.

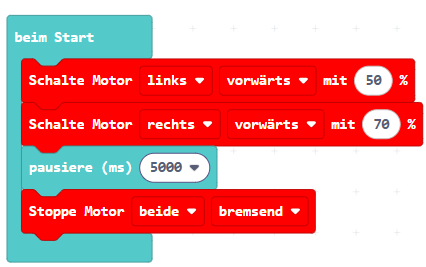
Damit unser Calli:bot ein Stück vorwärts fährt, wählen wir den letzten Block aus der Liste Schalte Motor aus. Wir stellen hier Motor_links und Motor_rechts ein. Außerdem setzen wir das Tempo der Motoren für beide jeweils auf 50%. Anschließend fügen wir im Programm einen Warte-Block ein, damit unser Programm 5000ms wartet bevor es die nächste Aktion ausführt und dabei stoppen soll. Danach fügen wir die Stoppe Motor Block ein.
Das Programm sieht dann wie folgt aus:
Herunterladen des Programms
1. Achte darauf, dass der Calliope und der Calli:bot ausgeschaltet sind.
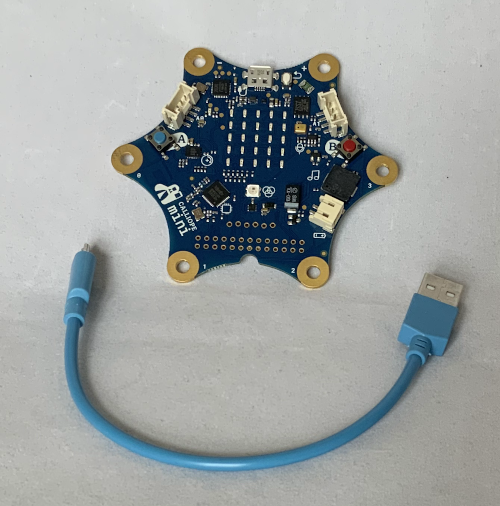
2. Schließe das USB-Kabel an deinen Calliope mini.
3. Schließe das andere Ende des USB-Kabels an deinen Computer an. (Dabei sollte die Status-Leuchte des Calliope mini leuchten (gelb/orange).
4. Lade das Programm auf deinen Calliope mini, wie du es bereits aus einem vorherigen Kurs kennst.
5. Nach dem Herunterladen, ziehe das USB-Kabel vorsichtig vom Calliope ab.
6. Schalte den Calli:bot ein. (Auf der Rückseite gibt es 2 Tasten. Ein/On zum Einschalten und Aus/Off zum Ausschalten.) (Der Calli:bot wir das letzt Programm, was er gestartet hatte, erneut ausführen.)
7. Drücke die Reset-Taste bis alle LEDs vom Display leuchten. Dann sollte anschließend die 1. LED für den 1. Programmspeicherplatz aufleuchten.Nun sollte der Calli:bot fahren bzw. das Programm ausführen.
Wenn du fertig bist mit Testen und Ausprobieren, schalte den Calli:bot wieder aus.
Du kannst auch fragen, warum beide Motoren nicht mit 50% oder 70% laufen (schlaue gefragt ;)). Manche Motoren sind stärker als andere, deshalb soll man diese Hardware-Fehler in der Software korrigieren. Du sollst testen um herauszufinden, welche Motorleistungen zu deinem Callibot passen.
-
-
-
 Tipp: Wenn der linke und rechte Motor bei gleicher Geschwindigkeitseinstellung nicht zusammen geradeaus fahren, kannst du die Geschwindigkeit so anpassen, dass einer schneller als der andere eingestellt wird, damit sie gemeinsam dann geradeaus fahren. In dem Fall gleicht die Software (also dein Programm) Hardware-"Probleme" (unterschiedliches Verhalten der Motoren) aus.
Tipp: Wenn der linke und rechte Motor bei gleicher Geschwindigkeitseinstellung nicht zusammen geradeaus fahren, kannst du die Geschwindigkeit so anpassen, dass einer schneller als der andere eingestellt wird, damit sie gemeinsam dann geradeaus fahren. In dem Fall gleicht die Software (also dein Programm) Hardware-"Probleme" (unterschiedliches Verhalten der Motoren) aus.
-
-
Eine LED ist eine Leuchtdiode. LED steht dabei für Light Emitting Diode. Auf deutsch heißt es lichtemittierende Diode und bedeutet Licht aussendende Diode.
Die Funktionsweise einer LED ist uns bereits aus der Tierwelt bekannt. Denn überspitzt formuliert ist zum Beispiel das energiegeladene Glühwürmchen eine fliegende LED. Der Unterschied besteht einzig darin, wie die Atome im Inneren angeregt und somit zum Leuchten gebracht werden. Den Leuchtkäfern gelingt dies durch eine chemische Reaktion. Bei der LED passiert das mithilfe elektrischen Stroms – kurz: Elektrolumineszenz.
Eine Leuchtdiode besteht aus einer Anode und einer Kathode. Für den Stromfluss zwischen beiden Polen sorgt ein Draht, der sogenannte Bonddraht. Hierüber fließt die notwendige Energie für die gewünschte Elektrolumineszenz.
Auf der Kathode sitzt ein Chip, der umgeben ist von einer Kunststofflinse, die den Chip schützen und das Licht im Raum verteilen soll. Der zur Lichterzeugung verwendete Chip ist in eine sogenannte Reflektorwanne eingesetzt, durch die eine gute Lichtausbeute und ein hoher Wirkungsgrad erzielt wird.
Beim Chip handelt es sich um einen Halbleiterkristall aus zwei verschiedenen Materialien, welche unterschiedlich dotiert sind. Das bedeutet, dass ein Überschuss an positiven oder negativen Ladungsträgern existiert. Fließt nun Strom, reagieren die Elektronen, und es wird Energie in Form von Photonen freigesetzt. Die LED leuchtet.
Neun Vorteile der LED auf einen Blick
1. Sehr geringer Stromverbrauch. LEDs sind äußerst effizient, wenn es darum geht Energie in Licht umzuwandeln.
2. Hohe Lichtausbeute. LED-Leuchtmittel können mit relativ wenig Strom viel Leuchtkraft entwickeln.
3. Lange Lebensdauer. LEDs müssen deutlich weniger oft ausgetauscht werden als herkömmliche Glühbirnen.
4. Leichter Austausch/Wechsel durch einheitliche Fassung.
5. Enthält keine gesundheitsgefährdenden Stoffe, wie beispielsweise Quecksilber. Eine beschädigte LED-Lampe ist nicht gefährlich.
6. Keine Einschaltverzögerungen. LEDs entfalten sofort nach dem Einschalten die gewünschte Leuchtkraft.
7. Keine UV-Strahlung. UV-Strahlung bedeutet Wärme, da LED-Lampen kein UV-Licht abstrahlen, eignen sie sich besonders gut für Orte, an denen eine Erwärmung ungünstig wäre.
8. Funktionieren auch bei extremen Temperaturen. LED-Lampen sind bei Temperaturen bis zu minus 60 Grad Celsius einsatzfähig.
9. LED-Lampen sind vielseitig einsetzbar. Ihre geringe Hitzeentwicklung und die vielen Möglichkeiten bezüglich Lichtintensität, Lichtfarbe und Form machen sie universell einsetzbar.
(Quelle: https://www.vattenfall.de/infowelt-energie/funktionsweise-einer-led-vorteile)
-
Kommen wir nun zu unserem Calli:Bot. Wir wollen die LEDs, die der Calli:Bot besitzt leuchten lassen. Der Calli:Bot besitzt auf der Unterseite seines Fahrgestells 4 RGB LEDs. Sie funktionieren wie die RGB-LED auf dem Calliope mini.
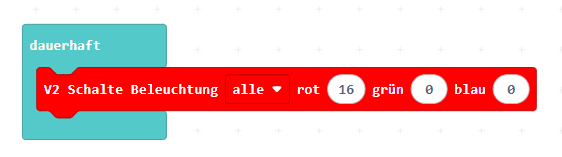
Ein kleines Programm für das Einschalten der RGB-LED des Calliope Mini (in der Farbe rot) sieht wie folgt aus:
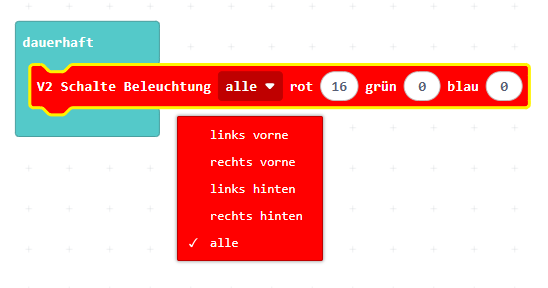
Wenn man die Auswahlliste öffnet, sind auch alle RGB-LEDs des Calli:Bot verfügbar. Die Beschriftung der RGB-LEDs des Calli:Bot sind dabei die Gleichen, wie in der Konfiguration, was wir zu Beginn des Kurses bereits durchgenommen hatten. Die Beschriftung der RGB-LED des Calliope wird hingegen vom System festgelegt.
Wie du es vielleicht noch vom Calliope mini Kurs kennst, kannst du die RGB-LED mit einem Block aus der Calli:bot 2 Kategorie einschalten und eine Farbe festlegen, in der die LED leuchten soll und mit einem weiteren Block aus derselben Kategorie wieder ausschalten von der Calli:bot 2 Kategorie. Damit wir festlegen können, wie lange eine LED leuchtet, nutzen wir den Pausiere ms-Block von der Grundlagen Kategorie und geben die Zeit in Millisekunden ms an, bevor der nächste Block ausgeführt wird und in meinem Fall die LED ausgeschaltet wird.
-
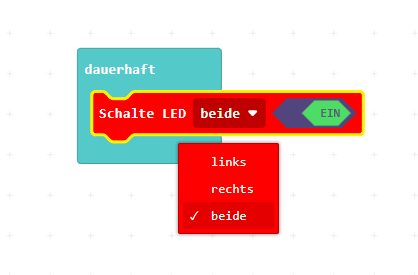
Der Calli:Bot besitzt noch 2 weitere LEDs. Dies befinden sich oben an der Vorderseite und sind rot. Sie können auch nur rot leuchten. Aufgrund ihrer Anordnung kann man sie zum Beispiel als Blinker verwenden.
Die Programmierung ist prinzipiell ähnlich der RGB-LED, jedoch wählen wir keine Farbe aus, sondern schalten die entsprechende LED ein oder aus.
-
-
-
Der Ultraschallsensor ist der Sensor, der wie 2 Augen aussieht und an der Vorderseite des Calli:Bot angesteckt ist. Der Sensor misst in welcher Entfernung ein Objekt oder Hindernis zum Calli:Bot steht. Dabei wird ein Ultraschallsignal ausgesendet, es reflektiert an einem festen Objekt und wird vom Ultraschallsensor wieder empfangen. Anhand der Zeit, die das Signal vom Aussenden bis zum Empfangen braucht, berechnet der Roboter beziehungsweise das Programm, wie weit das Hindernis entfernt ist. In der folgenden Grafik ist es schematisch dargestellt.
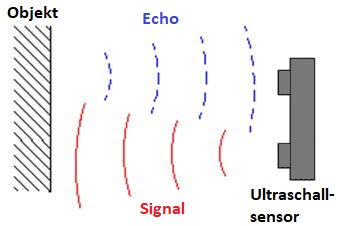 Quelle: https://www.generationrobots.com/blog/de/ultraschallsensoren-fur-kollisionvermeidung/
Quelle: https://www.generationrobots.com/blog/de/ultraschallsensoren-fur-kollisionvermeidung/ -
Um die Programmierung des Sensors kennenzulernen, werden wir als erstes den Messwert auf dem Calliope mini ausgeben lassen. Die Blöcke für den Ultraschallsensor findest du in der Kategorie Calli:bot 2 mit den Namen "Warte bis Entfernung (cm) = 0"und "Entfernung "cm".
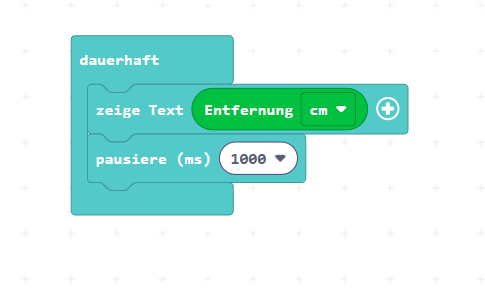
Im folgenden Beispiel siehst du, dass dieser Block "Entfernung (cm)" mit dem "Zeige Text"-Block verbunden ist. Dadurch werden die gemessenen Werte auf dem Calliope mini ausgegeben. Da so eine Messung in einem Bruchteil einer Sekunde erfolgt, sollte man die Messung öfter durchführen lassen, wie im Beispiel in einer Wiederholungsschleife. Damit man die Zahlen auf dem Display auch lesen kann, muss noch ein "pausiere (ms)"-Block eingebunden werden, da unsere Augen die Werte sonst nicht so schnell lesen können.
-
-
-
Der Lichtsensor befindet sich auf der Unterseite des Calli:Bots und ist durch die Kugelhalterung geschützt. An der Kugelhalterung befindet sich eine Öffnung mit 3 Aussparungen. Die helle Diode in der Mitte ist eine Infrarot-LED und die dunklen Dioden sind Infrarot-Sensoren (Infrarot kurz IR). Die LED sendet ein Infrarot-Signal aus und die Reflexion wird von den beiden IR-Sensoren empfangen. Anhand der Messwerte kann man somit zwischen hell (weiß) und dunkel (schwarz) unterscheiden.
-
Programmierbeispiel zur Linienverfolgung
Da das Programmierbeispiel etwas komplexer ist, stelle ich meine Lösung zur Verfügung.
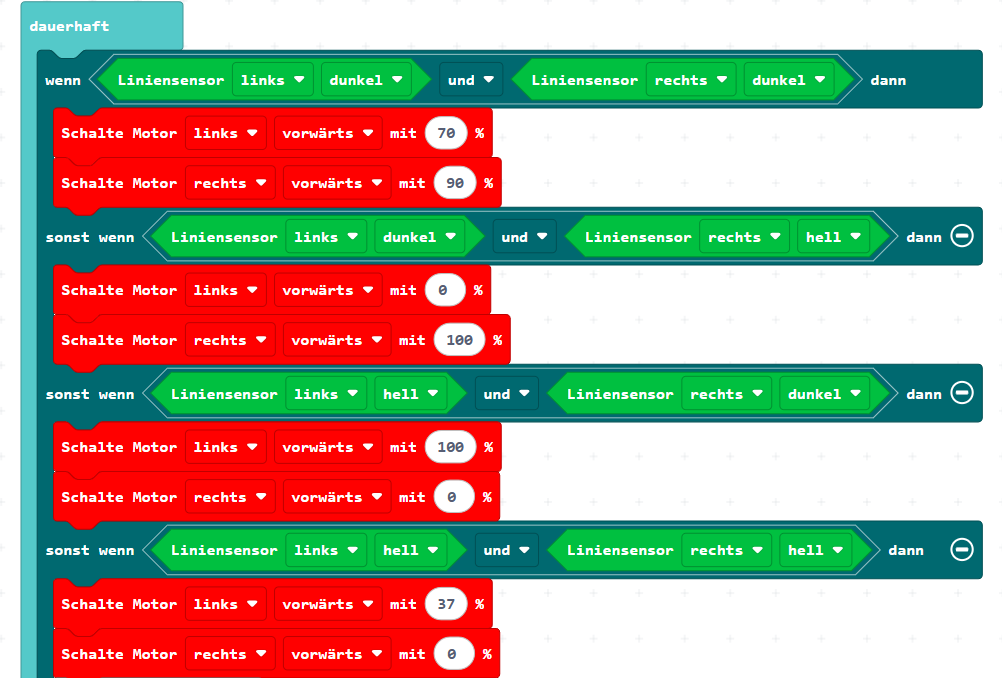
Es gibt 4 Zustände, die möglich sind.
1. Beide IR-Sensoren liefern eine dunkle Linie, dann sollen beide Motoren gleich schnell drehen.
2. Der linke IR-Sensor sieht eine dunkle Linie und der rechte IR-Sensor sieht den hellen Untergrund, dann muss sich der rechte Motor drehen, um zu korrigieren.
3. Der rechte IR-Sensor sieht eine dunkle Linie und der linke IR-Sensor sieht den hellen Untergrund, dann muss sich der linke Motor drehen, um zu korrigieren.
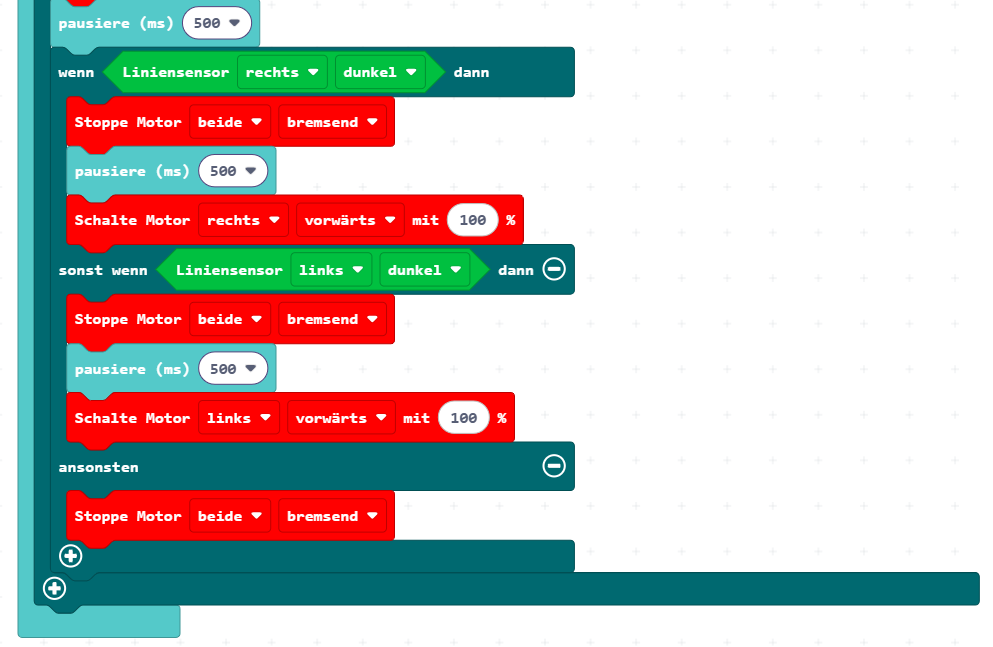
4. Wenn beide IR-Sensoren den hellen Untergrund sehen, ist die Linie zu Ende, oder der Roboter ist von der Linie komplett abgekommen und dann soll er sich nach rechts oder links umdrehen bis er die Linie wieder findet. Wenn nicht, soll er anhalten. (Da es nur diese 4 Zustände gibt, kann man 3 Zustände mit einer Bedingung definieren und den letzten mit sonst nutzen.)
-


