Material für den Kurs
Abschnittsübersicht
-
-
Zugeschicktes Material
Du solltest von der Webakademie für diesen Kurs den Calli:bot2 in einer Verpackung zugeschickt bekommen haben, wie im folgenden Bild zusehen:

Die Verpackung ist sehr stabil, so dass du deinen Calli:bot bei Nichtgebrauch immer wieder in die Schachtel zurücklegen kannst, dann staubt er auch nicht ein
-
Batterien
Beim Calliope mini gab es 2 AAA-Batterien dazu. Für den Calli:bot2 benötigst du 3 AAA-Batterien.

In der Bedienungsanleitung gibt es noch ein paar Sicherheitshinweise zu Batterien:
-
Aufbau
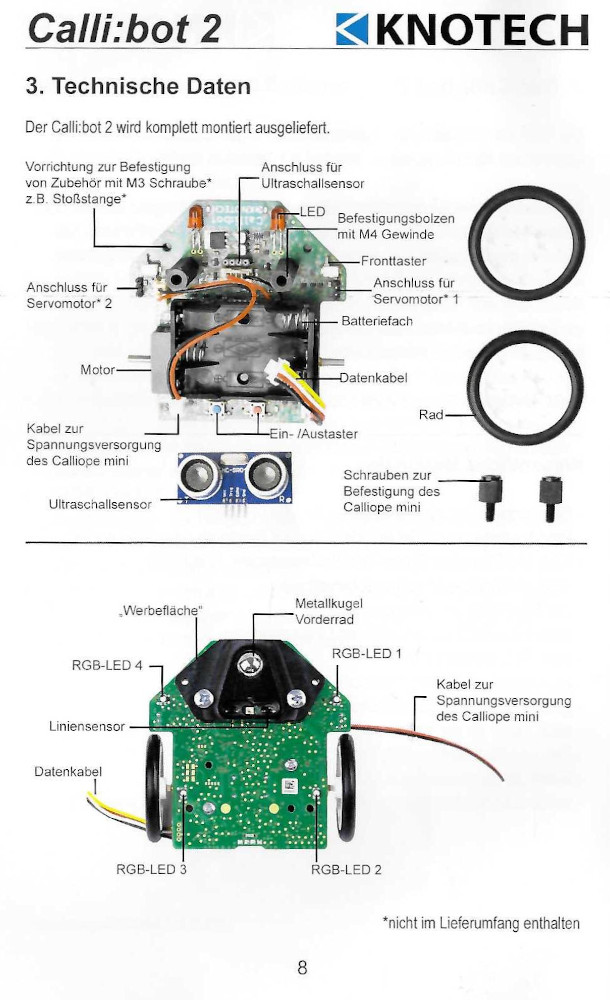
Auf der Seite zu den Technischen Daten kannst du nachlesen woraus das Fahrgestell besteht, bzw. wo die Bauelemente angeordnet sind:
In diesem Abschnitt bauen wir den Calli:bot2 zusammen.
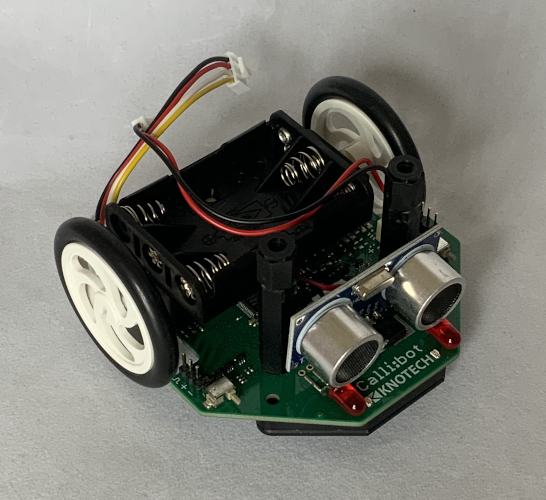
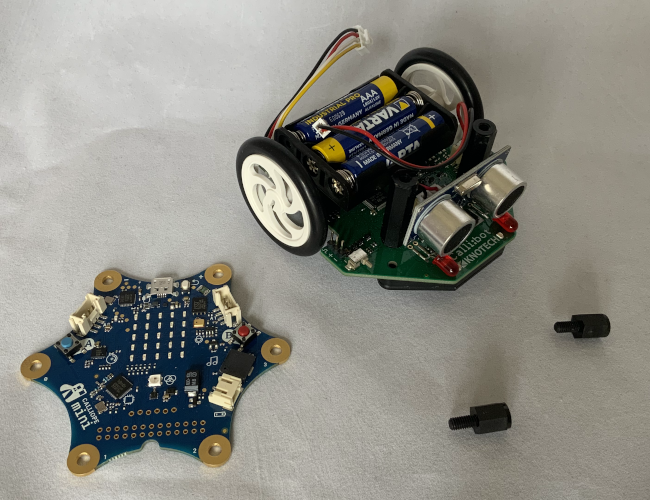
1. Nimm das Fahrgestell aus der Verpackung heraus:
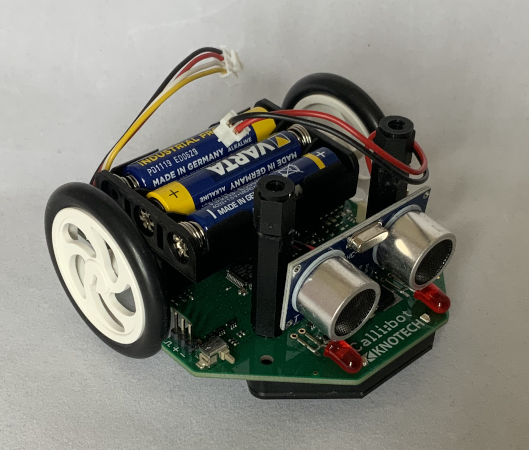
2. Setze 3 AAA-Batterien in das Batteriefach ein.
3. Schraube die Befestigungsbolzen für die Halterung des Calliope mini vom Fahrgestell ab und lege den Calliope mini bereit.
Die folgenden Schritte 4, 5 und 6 kannst du auch in ihrer Reihenfolge tauschen.
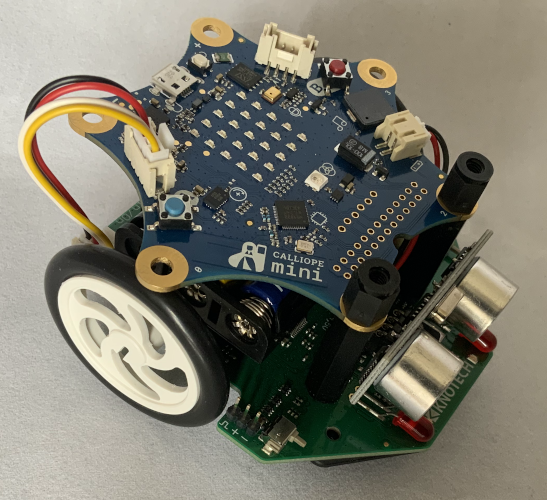
4. Den Calliope mini mit den Befestigungsbolzen über die Pins 1 und 2 befestigen, so dass der USB-Anschluss vom Calliope mini nach hinten zeigt.
5. Schließe das Datenkabel (mit 4 Drähten) am Grove-Anschluss des Calliope mini an neben der Taste A.
6. Schließe das Stromversorgungskabel an der Batteriebuchse des Calliope mini an.
Fertig!
-
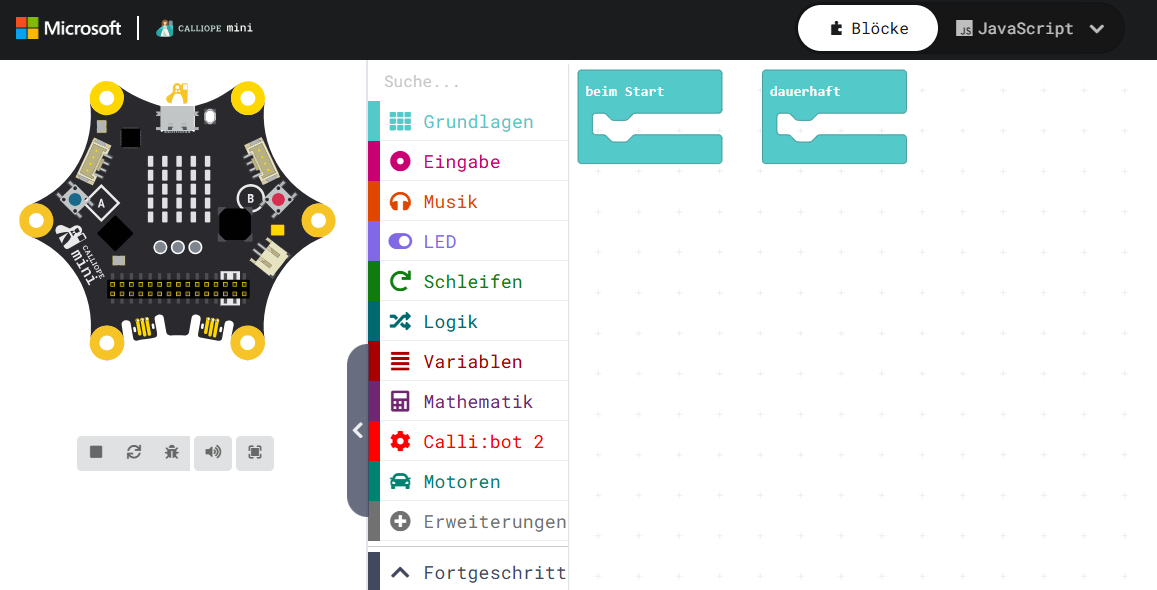
Programmieren
Der Calli:bot kann mit MakeCode, NEPO oder TigerJython4Kidsprogrammiert werden. Wir verwenden in diesem Kurs die Programmierumgebung MakeCode. Unter folgender Webadresse kann der Webeditor aufgerufen werden:
https://makecode.calliope.cc/#
-
Konfiguration
Um den Calli:bot2 in Makecode hinzufügen zu können, also damit du ihn programmieren kannst, muss er dem System erst "vorgestellt" werden. Folge dafür der Schritt für Schritt Anleitung.
1. Neues Projekt anklicken
2. Name auswählen und Erstelle anklicken
3. Calliope V3 auswählen
4. Erweiterungen anklicken
5. Callibot in die Suchleiste eingeben und dann auswählen
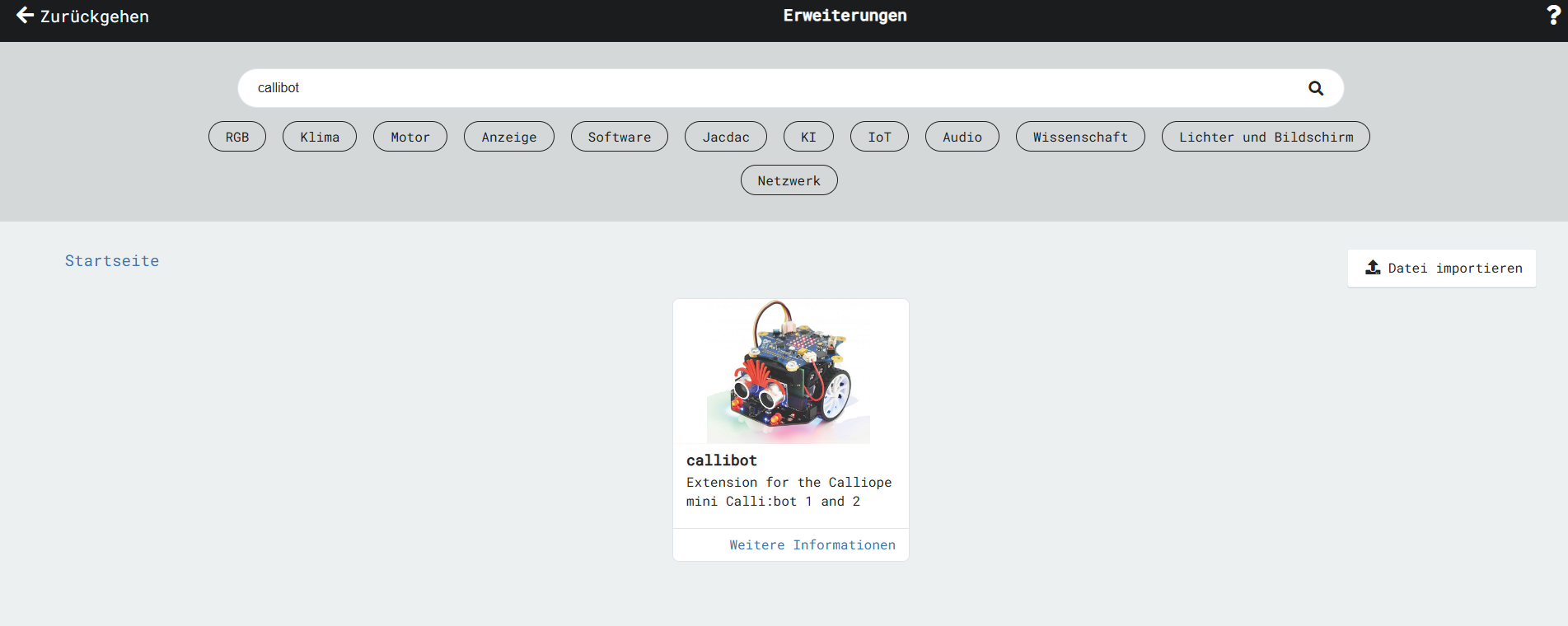
6. Die Funktionen für den Callibot sind jetzt im Makecode verfügbar
-
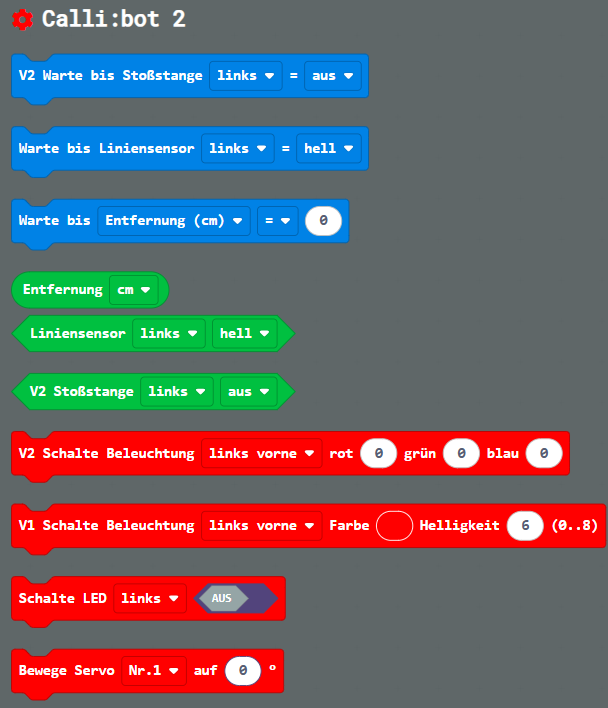
Erste Programmierschritte
Wähle die Kategorie Calli:bot 2 und dort findest du alle Programmierblöcke des Calli:bots z.B Motoren, Ultraschallsensor (Entfernung), IR Sensor (Liniensensor), LEDs usw.

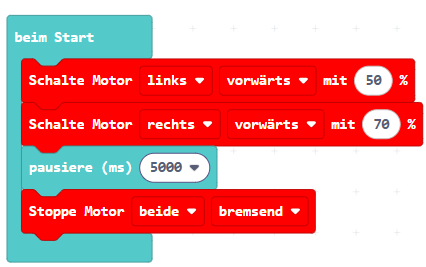
Damit unser Calli:bot ein Stück vorwärts fährt, wählen wir den letzten Block aus der Liste Schalte Motor aus. Wir stellen hier Motor_links und Motor_rechts ein. Außerdem setzen wir das Tempo der Motoren für beide jeweils auf 50%. Anschließend fügen wir im Programm einen Warte-Block ein, damit unser Programm 5000ms wartet bevor es die nächste Aktion ausführt und dabei stoppen soll. Danach fügen wir die Stoppe Motor Block ein.
Das Programm sieht dann wie folgt aus:
Herunterladen des Programms
1. Achte darauf, dass der Calliope und der Calli:bot ausgeschaltet sind.
2. Schließe das USB-Kabel an deinen Calliope mini.
3. Schließe das andere Ende des USB-Kabels an deinen Computer an. (Dabei sollte die Status-Leuchte des Calliope mini leuchten (gelb/orange).
4. Lade das Programm auf deinen Calliope mini, wie du es bereits aus einem vorherigen Kurs kennst.
5. Nach dem Herunterladen, ziehe das USB-Kabel vorsichtig vom Calliope ab.
6. Schalte den Calli:bot ein. (Auf der Rückseite gibt es 2 Tasten. Ein/On zum Einschalten und Aus/Off zum Ausschalten.) (Der Calli:bot wir das letzt Programm, was er gestartet hatte, erneut ausführen.)
7. Drücke die Reset-Taste bis alle LEDs vom Display leuchten. Dann sollte anschließend die 1. LED für den 1. Programmspeicherplatz aufleuchten.Nun sollte der Calli:bot fahren bzw. das Programm ausführen.
Wenn du fertig bist mit Testen und Ausprobieren, schalte den Calli:bot wieder aus.
Du kannst auch fragen, warum beide Motoren nicht mit 50% oder 70% laufen (schlaue gefragt ;)). Manche Motoren sind stärker als andere, deshalb soll man diese Hardware-Fehler in der Software korrigieren. Du sollst testen um herauszufinden, welche Motorleistungen zu deinem Callibot passen.
-

