Lichtsensor
Abschnittsübersicht
-
Hervorgehoben
-
Der Lichtsensor befindet sich auf der Unterseite des Calli:Bots und ist durch die Kugelhalterung geschützt. An der Kugelhalterung befindet sich eine Öffnung mit 3 Aussparungen. Die helle Diode in der Mitte ist eine Infrarot-LED und die dunklen Dioden sind Infrarot-Sensoren (Infrarot kurz IR). Die LED sendet ein Infrarot-Signal aus und die Reflexion wird von den beiden IR-Sensoren empfangen. Anhand der Messwerte kann man somit zwischen hell (weiß) und dunkel (schwarz) unterscheiden.
-
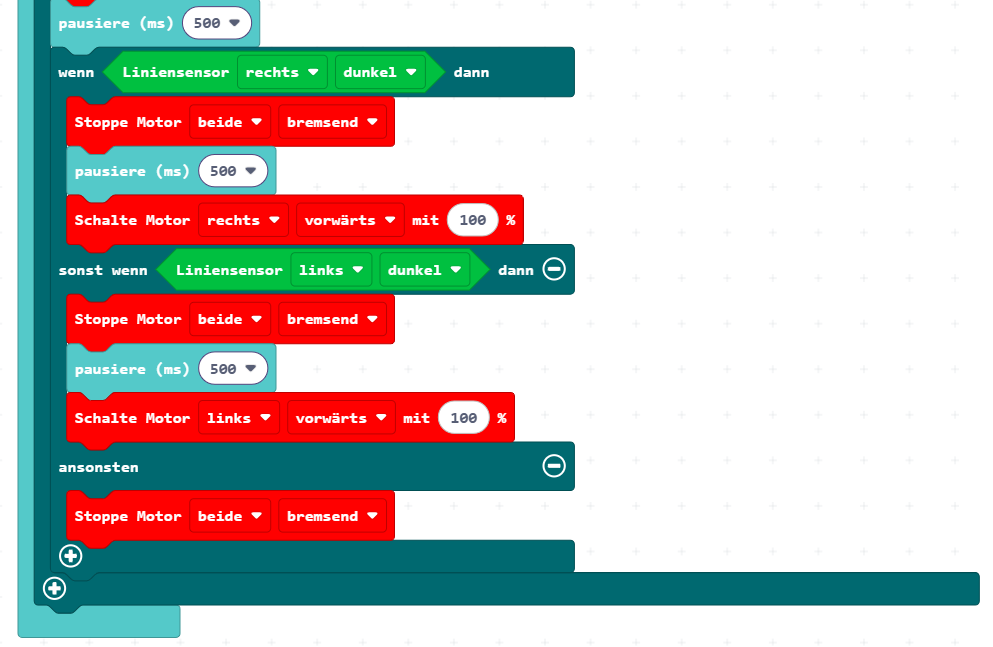
Programmierbeispiel zur Linienverfolgung
Da das Programmierbeispiel etwas komplexer ist, stelle ich meine Lösung zur Verfügung.
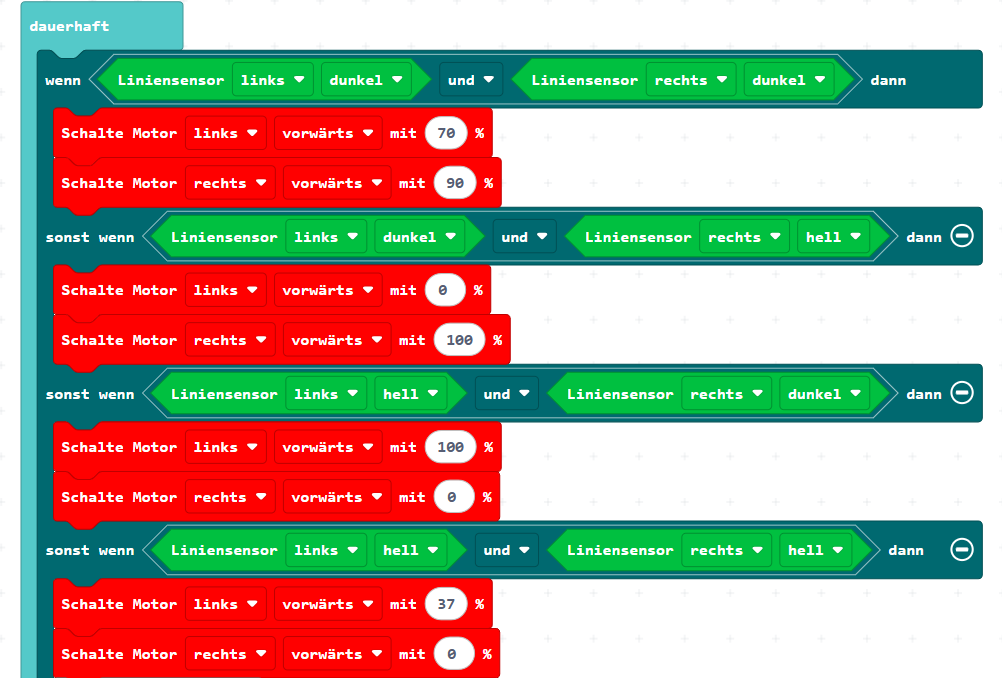
Es gibt 4 Zustände, die möglich sind.
1. Beide IR-Sensoren liefern eine dunkle Linie, dann sollen beide Motoren gleich schnell drehen.
2. Der linke IR-Sensor sieht eine dunkle Linie und der rechte IR-Sensor sieht den hellen Untergrund, dann muss sich der rechte Motor drehen, um zu korrigieren.
3. Der rechte IR-Sensor sieht eine dunkle Linie und der linke IR-Sensor sieht den hellen Untergrund, dann muss sich der linke Motor drehen, um zu korrigieren.
4. Wenn beide IR-Sensoren den hellen Untergrund sehen, ist die Linie zu Ende, oder der Roboter ist von der Linie komplett abgekommen und dann soll er sich nach rechts oder links umdrehen bis er die Linie wieder findet. Wenn nicht, soll er anhalten. (Da es nur diese 4 Zustände gibt, kann man 3 Zustände mit einer Bedingung definieren und den letzten mit sonst nutzen.)
-


