Ultraschallsensor
Abschnittsübersicht
-
-
Der Ultraschallsensor ist der Sensor, der wie 2 Augen aussieht und an der Vorderseite des Calli:Bot angesteckt ist. Der Sensor misst in welcher Entfernung ein Objekt oder Hindernis zum Calli:Bot steht. Dabei wird ein Ultraschallsignal ausgesendet, es reflektiert an einem festen Objekt und wird vom Ultraschallsensor wieder empfangen. Anhand der Zeit, die das Signal vom Aussenden bis zum Empfangen braucht, berechnet der Roboter beziehungsweise das Programm, wie weit das Hindernis entfernt ist. In der folgenden Grafik ist es schematisch dargestellt.
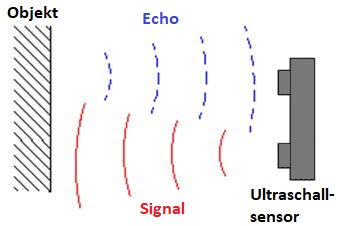 Quelle: https://www.generationrobots.com/blog/de/ultraschallsensoren-fur-kollisionvermeidung/
Quelle: https://www.generationrobots.com/blog/de/ultraschallsensoren-fur-kollisionvermeidung/ -
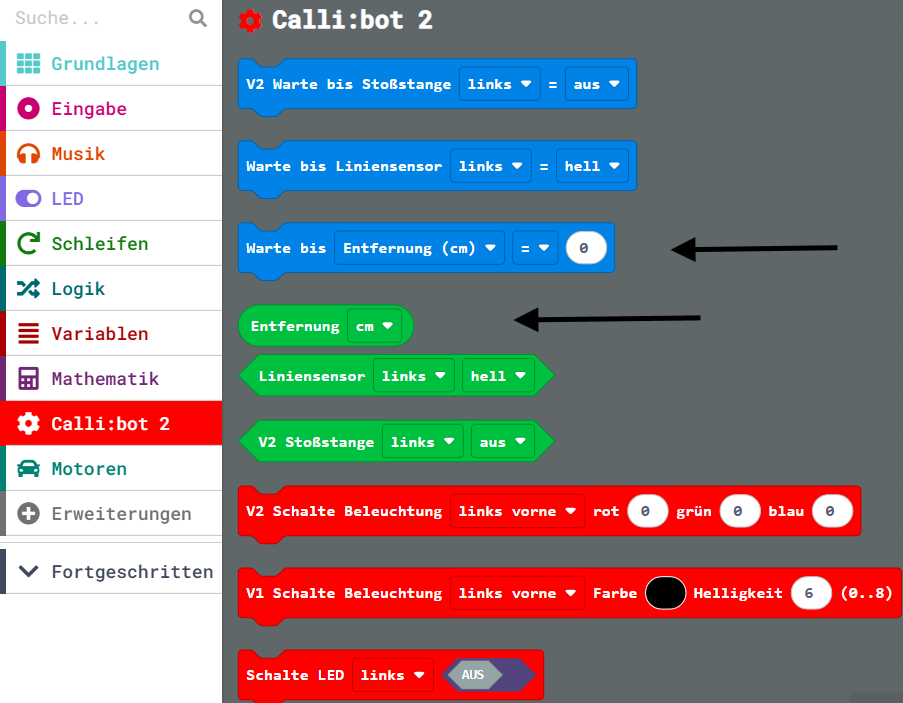
Um die Programmierung des Sensors kennenzulernen, werden wir als erstes den Messwert auf dem Calliope mini ausgeben lassen. Die Blöcke für den Ultraschallsensor findest du in der Kategorie Calli:bot 2 mit den Namen "Warte bis Entfernung (cm) = 0"und "Entfernung "cm".
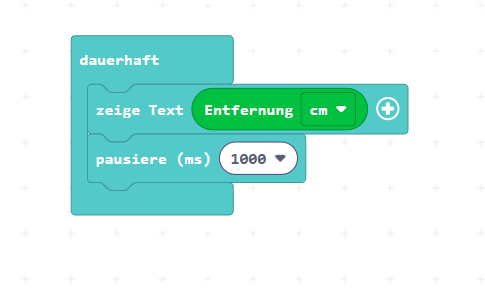
Im folgenden Beispiel siehst du, dass dieser Block "Entfernung (cm)" mit dem "Zeige Text"-Block verbunden ist. Dadurch werden die gemessenen Werte auf dem Calliope mini ausgegeben. Da so eine Messung in einem Bruchteil einer Sekunde erfolgt, sollte man die Messung öfter durchführen lassen, wie im Beispiel in einer Wiederholungsschleife. Damit man die Zahlen auf dem Display auch lesen kann, muss noch ein "pausiere (ms)"-Block eingebunden werden, da unsere Augen die Werte sonst nicht so schnell lesen können.
-

